Slider Custom Controllers: Construction
The pictures and videos below illustrate the construction process of my slider controllers. In short: Linear potentiometers + arduino + wood + unity. And some more stuff to get the motors working.
Specs
Each of the controllers (12 in total):
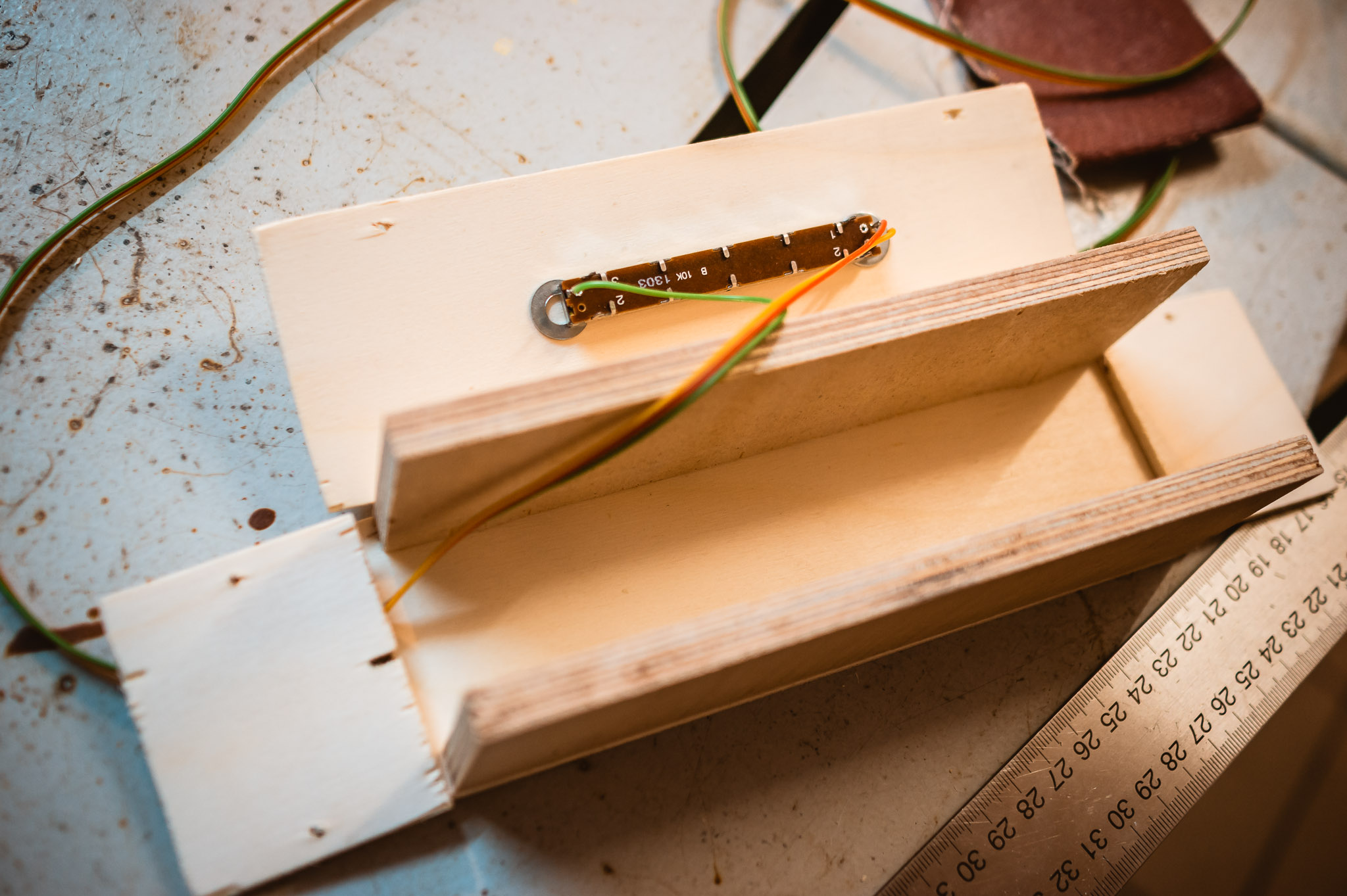
- Dimensions: 190mm x 60mm x 60mm, 100mm travel
- Materials: Plywood, linear potentiometer, motor unit, cabling
- Latency: < 15ms (~1 frame at 60hz)
The rest:
- A Teensy 3.0 Arduino-compatible microchip, connected via USB
- H-Bridge (L293DNE)
- Unity 4.3
Also required to run:
- A PC running Windows (a laptop will suffice)
- A monitor, as large as possible.
Photos of the Construction





Vines
Earliest minimal connection test (non-motorized):
Attaching a motor, and controlling it via an H-Bridge through the Arduino:
Follow me for my newest experiments: Follow @Robin_B